
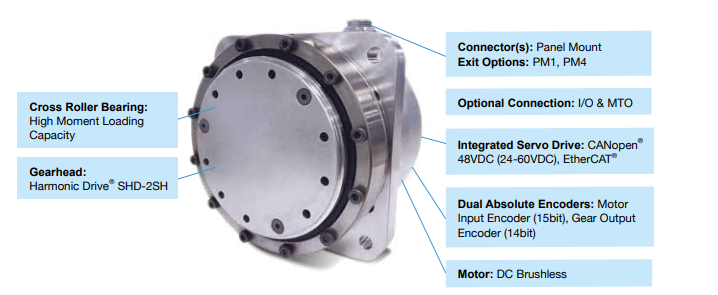
LPA Low Profile Rotary Actuator with Integrated Servo Drive
The Integrated Series is a family of compact actuators that deliver high torque with exceptional accuracy and repeatability. These servo actuators feature high precision Harmonic Drive® gearing combined with a brushless servo motor, magnetic dual absolute encoders and an Integrated Servo Drive with CANopen® or EtherCAT® communication options. This revolutionary product eliminates the need for an external drive and greatly simplifies cabling yet delivers high-positional accuracy and
torsional stiffness in a compact housing.
Features:
- Actuator + Integrated Servo Drive with CANopen® or EtherCAT® Communication Options
- CANopen Option Features
- Only a single cable with 4 conductors is needed for power and communication: CANH, CANL, VDC, 0VDC
- Up to 127 devices can be connected with bus or line topology options
- EtherCAT Option Features
- Approximately 100x faster compared to CANopen (100Mps vs 1Mps)
- Up to 200x more deterministic than CANopen (1 µs vs 100µs-200µs)
- Up to 65,536 devices can be connected with line, star, tree or ring topology options
- 48VDC Nominal Supply Voltage
- Zero Backlash Harmonic Drive® Gearing
- Panel Mount sealed connectors with radial and axial options
- Dual Absolute Encoders
- Control Modes include: Torque, Velocity, and Position Control as well as CSP, CSV, and CST
- Harmonic Drive HDL Commissioning Software
Options:
- Flex-rated mating cables with sealed connectors
- 4 I/O
- NPN or PNP Opto-Isolated Digital Inputs
- 2 Programmable Analog/Digital Inputs or Open Drain Outputs
LPA with Integrated Servo Drive Features

Ordering Code
| LPA | 20 | A | 101 | - | IDT 15b14b | - | PM1 | S | - | SP |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 1. | Model | LPA Integrated services |
| 2. | Size | 20 |
| 3. | Design Version | A |
| 4. | Gear Ratio | 51,81,101 |
| 5. | Encoder and Resolution | 15b14b - Integrated Drive Motor Input Encoder (15bit), Gear Output Encoder (14bit) |
| 6. | Options | PM1 – Axial Exit PM4 – Radial Exit |
| 7. | Communication and I/O Connection Signal |
Blank: CANopen® Option S: CANopen® with IO Option E: EtherCAT® Option ES: EtherCAT® with IO Option |
| 8. | Special Specifications |
Blank: Standard Product SP: Special Specification Code |
Specifications
| Item / Model |
LPA 20 IDT Actuator | ||||
| Gear Ratio |
51 | 81 | 101 | ||
| Maximum torque | Nm |
34 | 49 | 57 | |
| Maximum Speed | rpm |
88.2 | 55.6 | 44.6 | |
| Maximum current |
Arms |
13.4 | 13.4 | 11.5 | |
|
Continuous torque1 |
Nm |
6.5 | 16 | 16.9 | |
|
Continuous speed1 |
rpm |
58.8 | 37.0 | 29.7 | |
|
Continuous current |
Arms | 4.5 | 4.5 | 4 | |
|
Torque constant |
Nm/A | 3.0 | 4.8 | 6.0 | |
|
Input power supply current |
Adc | 2.7 |
3.0 |
2.4 | |
|
Moment of inertia |
kgm2 | 0.02 | 0.06 | 0.09 | |
|
Allowable moment load |
NM | 93 | |||
| Moment stiffness | NM/rad |
21 x 104 | |||
|
Output bearing |
kN |
7.3 | |||
|
Encoder type |
– |
Dual Absolute |
|||
|
Motor encoder resolution |
– |
215 (32768) |
|||
|
Gear encoder resolution |
– |
214 (16384) |
|||
| Mass | kg | 1.4 | |||
|
Operating voltage |
V |
48 (24-60) |
|||
|
Communication protocol |
– |
CANopen® (DS301/DS402), EtherCAT® |
|||
|
Environmental4 |
Ambient operating temp |
°C |
0-40 |
||
|
Operating humidity |
%RH |
20-80 (no condensation) |
|||
|
Vibration resistance3 |
m/s2 |
25 |
|||
|
Shock |
m/s2 |
300 | |||
|
Max operating altitude |
m | 1000 | |||
|
No dust, no metal powder, no corrosive gas, no flammable gas, no oil mist, Indoor use only, no direct sunlight |
|||||
|
Motor insulation |
Insulation resistance: 100MΩ (by DC500V insulation tester), |
||||
|
Mounting direction |
Can be installed in any direction |
||||
|
Recommended heatsink size [mm]1 |
300 X 300 X 15 mm |
||||
1. Value after temperature rise and saturation when the recommended aluminum heatsink is installed.
2. Motor operation is not guaranteed in applications where vibrations and impacts are continuously applied for a long period of time.